基本資料
時間:3/25 星期六 早上 10:00-16:00
活動內容
為了督促自己的開放農業計畫,挖了一些坑,也歡迎隨意來分享與 hacking 您的農業專案,現場也有一些設備繼續加強中:
人數:6~8 人 (雖然很想看到大家,不過因爲會陸續舉辦,大家可以分次來)
# FarmBot:
## 龍門整線
## 空氣、抽水幫浦安裝
## 播種器測試
## 手臂移動 script
## (WebCam 安裝)
# 田間感測器:
## PyCom 與環天 LoRa 模組通訊測試
## 菜田感測器電路板 (Arduino Nano, LoRa module, 土壤溫度、溼度計)
## (18650 電池與太陽能充電板測試)(未購買)
# 農業 OpenData
## Influxdb 測試
## Ubidots 儀表板測試
API Document
https://ubidots.com/docs/api/index.html
Dashboard Test
https://app.ubidots.com/ubi/insights/#/list
## Bokeh 函式庫測試
活動之前相關準備
要準備帶來的零件
活動配套
3/25 記錄
記錄開機自動 report 的 parameters
R21 P0 V1 Q0
R21 P11 V120 Q0
R21 P12 V0 Q0 => 此參數怪怪的
R21 P13 V120 Q0
R21 P21 V0 Q0
R21 P22 V0 Q0
R21 P23 V0 Q0
R21 P25 V0 Q0
R21 P26 V0 Q0
R21 P27 V0 Q0
R21 P31 V0 Q0
R21 P32 V0 Q0
R21 P33 V0 Q0
R21 P36 V1 Q0
R21 P37 V0 Q0
R21 P41 V500 Q0
R21 P42 V5 Q0 => 此參數怪怪的
R21 P43 V500 Q0
R21 P51 V1 Q0
R21 P52 V1 Q0
R21 P53 V1 Q0
R21 P61 V50 Q0
R21 P62 V0 Q0
R21 P63 V50 Q0
R21 P71 V800 Q0
R21 P72 V800 Q0
R21 P73 V800 Q0
R21 P101 V0 Q0
R21 P102 V0 Q0
R21 P103 V0 Q0
R21 P111 V10 Q0
R21 P112 V10 Q0
R21 P113 V10 Q0
R21 P121 V10 Q0
R21 P122 V10 Q0
R21 P123 V10 Q0
R21 P201 V0 Q0
R21 P202 V60 Q0
R21 P203 V1 Q0
R21 P205 V0 Q0
R21 P206 V60 Q0
R21 P207 V1 Q0
R21 P211 V0 Q0
R21 P212 V60 Q0
R21 P213 V1 Q0
R21 P215 V0 Q0
R21 P216 V0 Q0
R21 P217 V1 Q0
R21 P221 V0 Q0
R21 P222 V60 Q0
R21 P223 V0 Q0
R00 Q0
R82 X0 Y0 Z0 Q0
R81 XA1 XB1 YA1 YB1 ZA1 ZB1 Q0
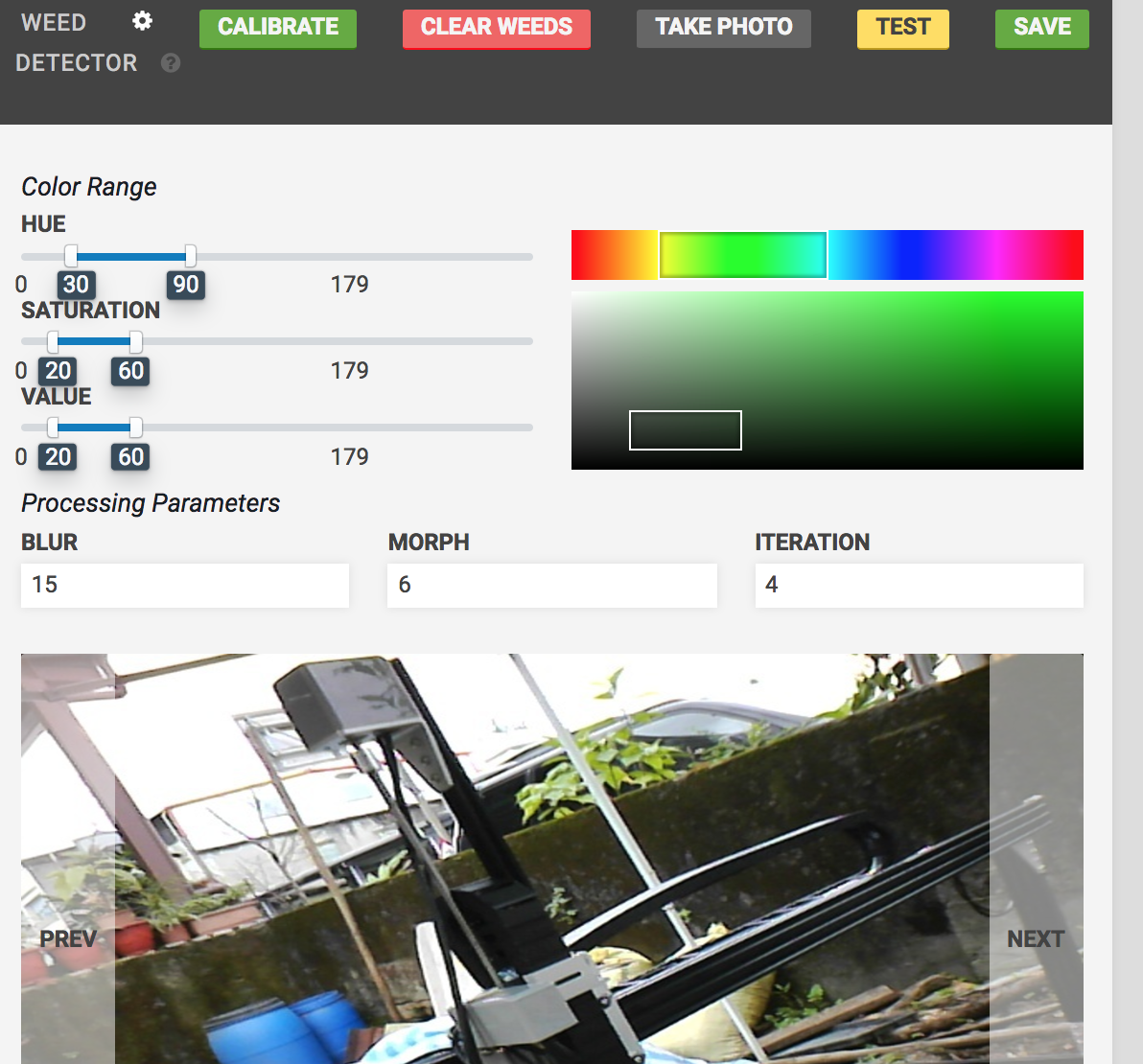
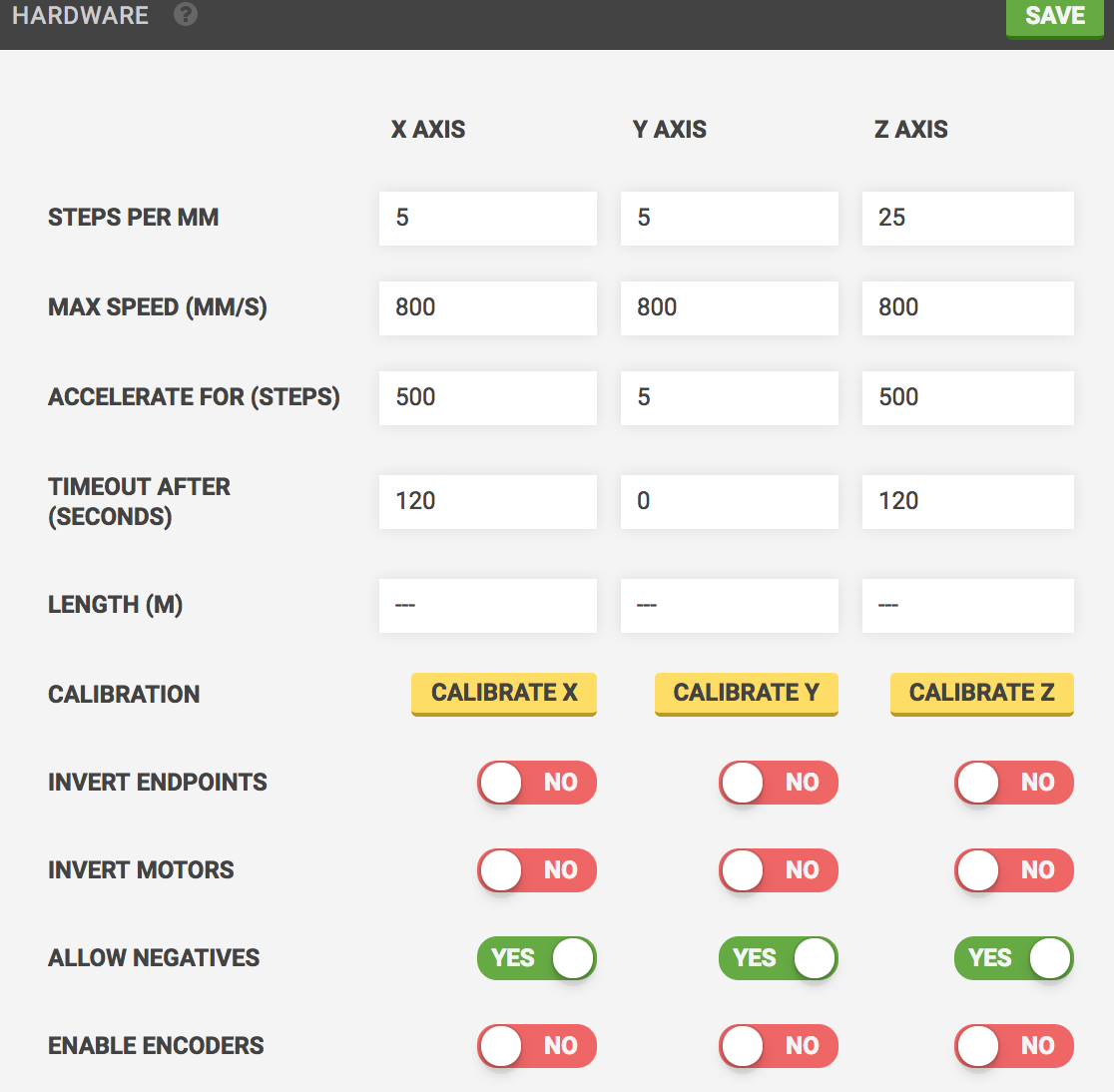
記錄網頁上看到的設定相關值
Camera 安裝步驟
將附的Camera, 接上 RPI USB, 按下 Take photo, 網頁有 log 會顯示 photo uploaded. 等一分鐘後 refresh 網頁,就可以看到

https://storage.googleapis.com/farmbot-production/temp1/9fc6e1b1-6ad9-4a71-abe5-dfafcc4551c1.jpg
Camera 方向調整:
由於 Camera 是圓形,也沒有說明方位,只能照完相,來確認
根據坐標系,將 Y 軸 reverse
F22 P42 V500
F22 P12 V120
3/25 完成事項




3/26 記錄
計畫
氣幫浦安裝成功,種子可以吸(直接使用 F41 P10 V1 M0),D10 就接給氣幫浦
針頭有粗有細,粗的遇到小種子會吸上很多個。細的針,就可以只吸起一個
基本上都可以吸起來,即使經過長長的管路

[PASS] Test Script - 走到第一定點,開氣,走到第二定點,關氣,走到第三定點,走回原點
#Current Debug
G00 X-500 Y0 Z0#Move to location at given speed for axis (don’t have to be a straight line), in absolute coordinates
F41 P10 V1 M0
G00 X-1000 Y0 Z0#Move to location at given speed for axis (don’t have to be a straight line), in absolute coordinates
F41 P10 V0 M0
G00 X-1500 Y0 Z0#Move to location at given speed for axis (don’t have to be a straight line), in absolute coordinates
G00 X0 Y0 Z0
F83#Report software version
升級 Arduino, 3/26 15:00 download 版
G00 X1000 Y1000 Z-100
G00 X0 Y0 Z0
Debug Y 軸經驗
關於Y軸的故障排除
2. 再次接上PC 去dump serial command 來確認default 值.
3. 重新接上 Rpi3, 連上 my.farmbot.io 確認Device\Hardware 的value table.
錄影時
-- record script
F41 P10 V1 M0
先走到 G00 X-10000 Y0 Z-5000,然後手動定位
G00 X-10000 Y0 Z-8000
G00 X-10000 Y0 Z0
G00 X0 Y0 Z0
Debug X 軸經驗
現有問題反饋


參考